Mirror Face
It seems that many friends are curious about the mirror face trick described in my paper. I am writing this technical report to describe it with more details.
mirror
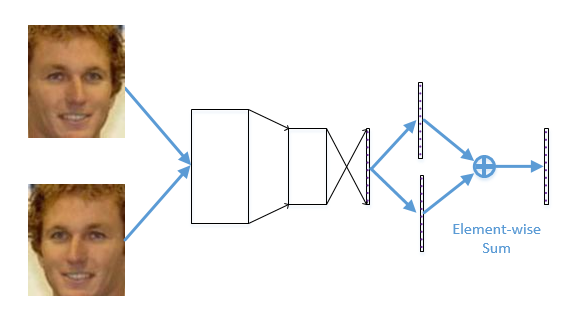
Mirror face is (one of) the most effective prior for face image analysis. It extracts features from the frontal face and mirror face simultaneously and merges the two features together as the final feature. A sample network is in FaceNormGithub/prototxt/example_of_mirror_face.prototxt.
Mirror face can be trained in an end-to-end manner. However, I find it has no help on training face verification models. It can improve the performance of face identification, but when I apply it on face verification, the accuracy even decreases:(
Here are the accuracies using Wen’s model with different feature merging strategy. We didn’t put these tables into our paper because we thought this was only a trick.
| PCA? | Front only | Concatenate | Element-wise SUM | Element-wise MAX |
|---|---|---|---|---|
| No | 98.5% | 98.53% | 98.63% | 98.67% |
| YES | 98.8% | 98.92% | 98.93% | 98.95% |
With my model:
| PCA? | Front only | Concatenate | Element-wise SUM | Element-wise MAX |
|---|---|---|---|---|
| No | 98.77% | 99.03% | 99.02% | 99% |
| YES | 98.96% | 99.17% | 99.2167% | 99.2167% |
And with Wu’s Light CNN B:
| PCA? | Front only | Concatenate | Element-wise SUM | Element-wise MAX |
|---|---|---|---|---|
| No | 98.10% | 98.35% | 98.42% | 98.35% |
| YES | 98.41% | 98.63% | 98.61% | 98.63% |
With my model:
| PCA? | Front only | Concatenate | Element-wise SUM | Element-wise MAX |
|---|---|---|---|---|
| No | 98.48% | 98.73% | 98.78% | 98.78% |
| YES | 98.45% | 98.55% | 98.65% | 98.62% |
It’s strange that with my C-contrastive loss, the performance of No PCA is better… Anyway, in Wu’s paper, he didn’t use PCA either. So there is nothing wrong with what I said in my paper: “I follow all the experiment settings of the original paper”.
To sum up, the mirror face trick is effective on most of the models (actually I never see cases that mirror face does not work). However, we are lacking the theoretical explanation for it. Now we can only explain it as model ensemble. Whether to use SUM or MAX, how to train it end-to-endly in face verification models, these are still open problems. Hope this report can inspire people to do further research.